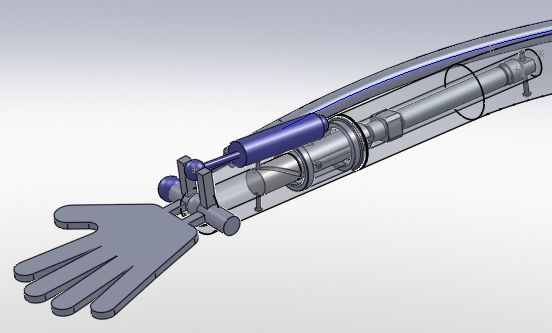
In my second iteration, I used a barrel cam with a helical groove cut into it to convert the linear motion of the hydraulic cylinder to a rotation of the forearm, which is supported on to 25mm bearings. (Although rotary actuators were considered, they were rejected because we want to keep the basic form factor of a human arm.)
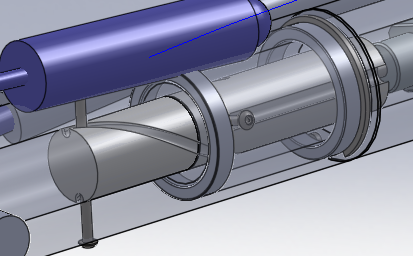
A close-up of the cam showing the modified machine screws used as followers.